自动顺序选择地址常数需要降低制备成本,这意味着使用解决方案基于自动化系统现在越来越普遍。这是由于这个选项的显著的优势,比如减少人员要求,完美的存货控制和管理,建立仓库的高度的可能性,缺乏处理设备选择的情况下,等货物通常存储在这种类型的系统,一般来说,媒介消费和补充完整的托盘订单。
有四个基本配置用于自动指令拣选从托盘:创建选择站在前面的自动化仓库,做同样的事但一侧的自动化仓库,建立吞并地区挑选位置,使用特殊的采摘机器人。这些是下面要讨论的。
在自动化仓库的前面
这是最常用的解决方案为小型或中型仓库挑选不是主要的操作。有不同的解决方案,可以通过选择取决于订单的数量,而且每一种都有不同的应用程序和性能。因此,必须将每个个案分析,以确定哪些元素的配置是最合适的。一个选择区域的例子在前面的仓库是照片所示。

选择站在前面的一个自动化仓库。
选择位置的一侧自动化仓库
这变质性是基于使用的配置79bob官网 在最低水平(地面)的一侧自动化仓库,脸朝外,以便形成一个通道。这些生活立场,允许两个或三个托盘每通道,用于包含大消费货物的托盘(参见下面的示例照片)。

横向拣选系统在自动仓库。
全储备托盘存储在其他传统的职位,主要是那些流架的上方,所以,码垛机可以补足这些清空。操作员沿着整个自动化货架的单位的帮助下拖板车或选择器。
其他产品,它bob手办官网存储在其他通道和消费在较小的卷,采摘选择位置位于前面的仓库。
这个系统的兼容一侧pick-to-light设备的使用,帮助操作,加快订单的准备。
挑选吞并地区
为高消费的产品bob手办官网,并减少准备时间,一个好的解决方案是创建一个地区的生活选择托盘两边的工作通道。bob手办官网产品是由航天飞机提供生活频道。
储备托盘存储在一个自动化仓库的塔式起重机。这个仓库,航天飞机之间的通信是通过辊或电车的使用输送机,电动单轨系统,或自动制导和激光制导车辆(AGV / LGV)。
搬运设备推荐使用的运营商是自行拖板车或地面选择。

自动化仓库挑选位置分布的例子。

自动化与机器人采摘
采摘机器人可以用于大规模自动化仓库挑选和补充。这些机器人可以自动处理单个盒子或完整的盒子(称为层)水平。

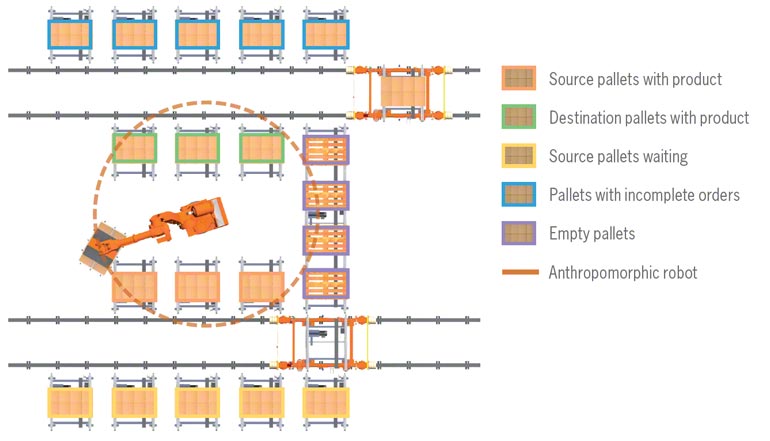
一个拟人化机器人处理托盘。
有三种类型的机器人:拟人化,双轴龙门,三轴龙门。机器人使用的选择主要是基于周期每小时要求的数量和订单的结合。
360º拟人化机器人,它可以旋转,有一个关节杆,它结合了不同的动作。这允许他们访问盒子或层在其作用半径。他们的操作类似于下图所示,这说明了一个托盘拆垛机机器人自动拣选系统:
双轴山墙机器人手臂刚性处理只能垂直移动。这手臂的身体沿着山墙是固定的水平移动,让机器人访问任何点在这条直线上。它可以访问几个托盘,通常位于四个或五个职位(两个源位置和其余目标位置)。
操作系统如下图所示:
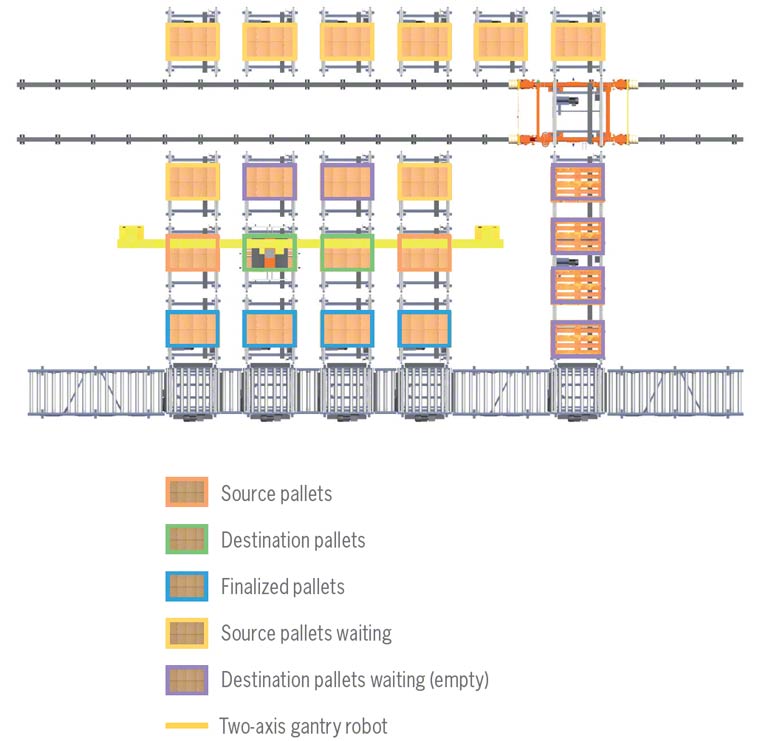

双轴龙门式机器人的图像。

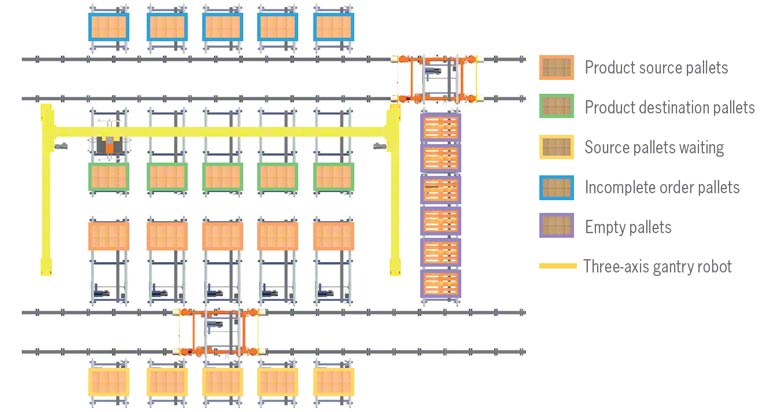
三轴龙门式机器人的图像。
三轴龙门式机器人双轴品种以类似的方式工作,但整个龙门沿着第三轴结构。这使得机器访问两个不同的托盘,每个被分配为源或目标的位置。因此,可以有多元化的订单和更多的订单可以准备。
操作系统所示: